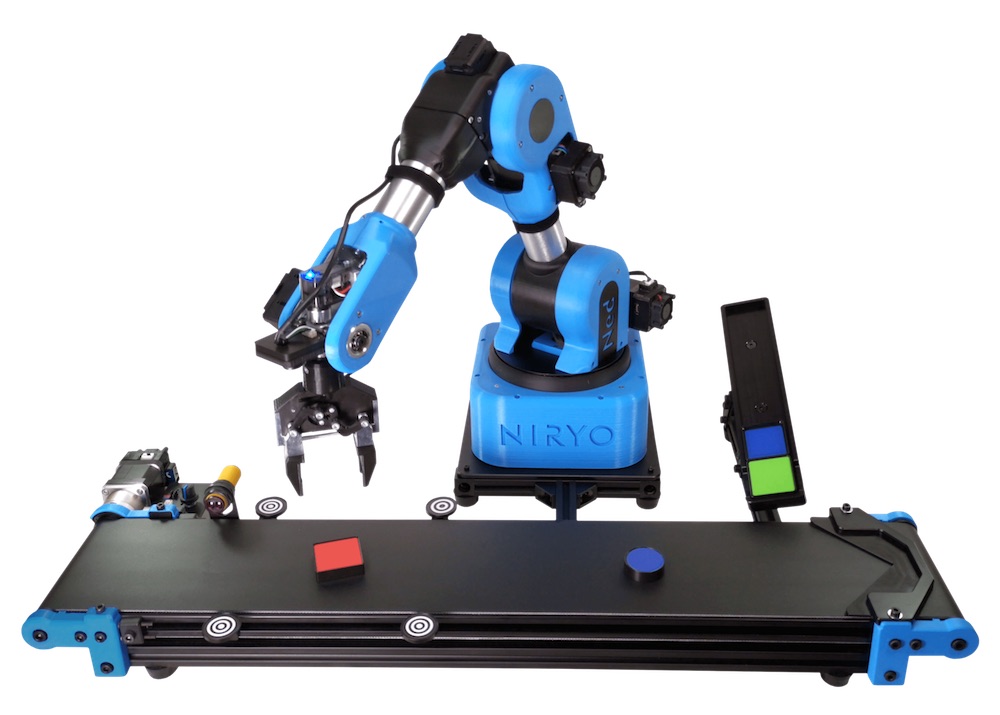
Niryo, a French developer of collaborative robots, has released Ned, a 6-axis cobot based on open-source technologies designed for education, training and research. Ned is the successor to the company’s popular Niryo One cobot that launched on Kickstarter a few years ago.
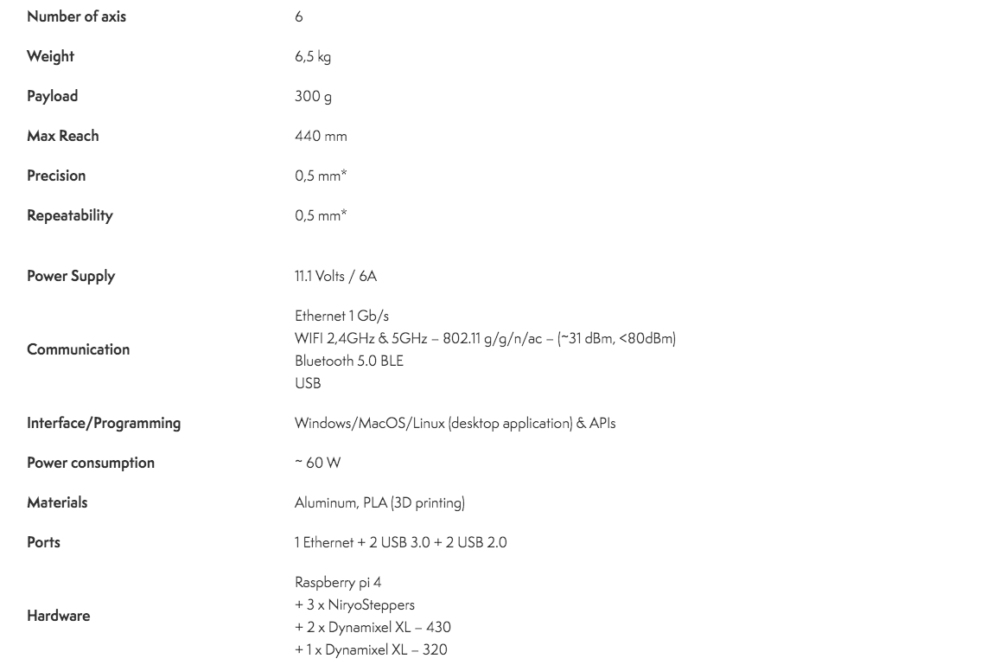
Ned offers repeatability of 0.5mm, a payload of 300g, and a maximum reach of 400mm. The cobot is based on Ubuntu 18.04 and ROS Melodic. With ROS, Ned has a set of libraries to design programs from the simplest to the most complex to meet your needs in a flexible way. Here is Niryo’s GitHub page for the Ned cobot.
Ned takes advantage of the capabilities of the Raspberry Pi 4, with a high-performance 64-bit ARM V8 processor, 2Gb of RAM, and improved connectivity. Users can even prototype various applications, including a production line.
Ned comes with a custom gripper that allows users to manipulate many objects. Its standard jaws allow you to catch many medium-sized objects, and it is possible to change the jaws to better suit your needs. The jaws pack, which is sold separately, consists of three sets of jaws (XL, Flat, Precision) to manipulate different types of objects. If you own a 3D printer, you can also create your own jaws to match your projects. Ned comes with an EasyConnect System to quickly swap out the grippers.
There are multiple ways to control Ned, including a mode that allows users to manually position the robot and teach it positions to be reproduced. The company also offers a free desktop application, Niryo Studio, that uses blocking coding (based on Blockly) to create programs for Ned.
Cobot Comparison Tool: How 100+ cobots stack up
If you’re a more advanced user, you can develop your own controller, use different languages and APIs (Python, C++, MATLAB, Modbus, TCP/IP) to control the robot directly or remotely, or dive directly into the ROS code.
Below is a spec sheet for Ned, which is available now and costs $2,999.
Leave a Reply
You must be logged in to post a comment.