Industrial robots are generally designed for one of three tasks: high-speed movements, high-precision placement, or high-payload movements. The risks to workers during operation are readily apparent — if a large robot is moving heavy payloads at high speeds, everyone nearby will understand the risks to their health and safety. Consequently, few individuals will question the need to isolate industrial robots from human contact during operation by means of hard guarding, safety interlocks, and safety sensing devices.
Collaborative robots (cobots), on the other hand, are not high-speed, high-payload, or exceptionally high-precision devices. Instead, they are designed to function in a collaborative space with workers, boosting production and reducing employee fatigue by automating repetitive tasks. They have been introduced as being safer than industrial robots thanks to their design profile and built-in safety features, but this conception is contrary to established safety standards.
Mismatch between perception and reality
As a hybrid technology in the industrial automation space, cobots are a bridge between isolated industrial robots and human assembly line operations. Early adopters have found what they perceived to be deficiencies, such as built-in safety features that are neither comprehensive nor foolproof, a slower overall motion relative to conventional robots (making cobots seem safer), and smaller payloads. Conversely, for some users, there were unexpected upsides due to their features and performance. These include cobots being easy to teach compared to standard robots, their highly intuitive software, and the fact that robot integrators are not required.
Because of the mismatch between perception and reality behind the features and usability of cobots, a comprehensive safety solution cannot be ignored. This drives the need for a standards-based risk assessment to consider application-specific risks posed by the cobot and the creation of an external safety package to supplement its built-in safety features.
Risk mitigation in the collaborative workspace, according to standards
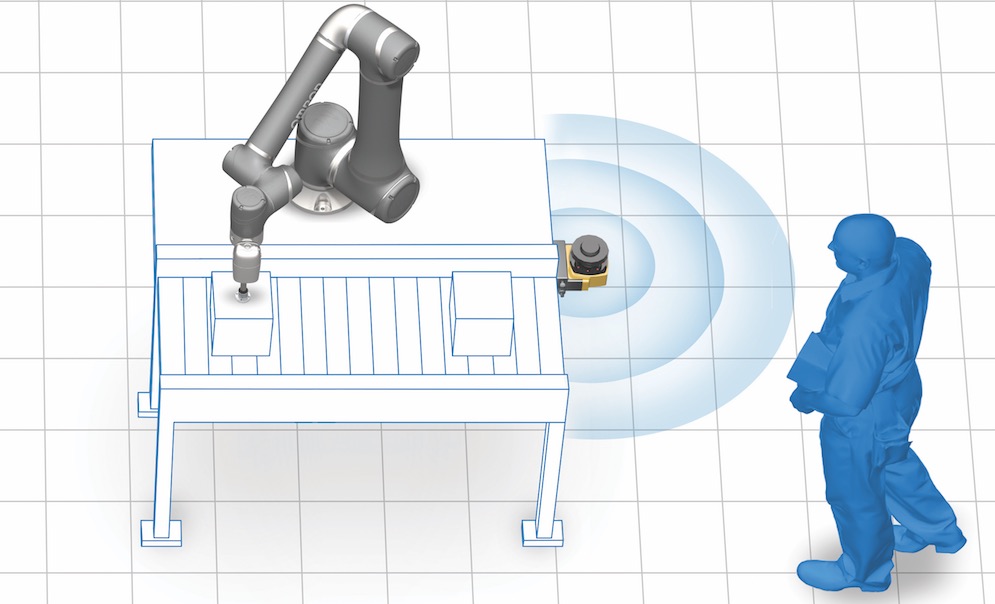
The cobot work environment introduces new terminology. The area in which the robot operates, and its associated tooling or additional equipment, is known as the collaborative workspace. Risk mitigation becomes more important when operators are sharing the same space as a cobot. Cobots have features that are designed to help mitigate this danger, although they do not completely eliminate it. These features include force feedback, speed monitoring, low inertia servomotors, elastic actuators, collision detection technology that limits the robot’s power and force capabilities to levels suitable for contact, lightweight frames, rounded edges, and minimized pinch points.
Force and speed monitoring are the defining abilities of collaborative robots, while standards drive the need for cobot safety. The safety standard ISO 10218 and the technical specification in RIA TS 15066 define the safety functions and performance of the collaborative robot. Under TS 15066, the force and speed monitoring of the cobot is set based on application data, human contact area, and workspace hazards. TS 15066 provides even more detail on force against the human body.

Switching between collaborative and non-collaborative mode
Collaborative robot design includes a feature that standard robots do not have: the ability to switch between collaborative and non-collaborative modes. Cobots enter the collaborative mode when their speed drops below the cutoff speed of 250mm/ sec per axis. ISO 10218 has defined this cutoff as a relatively safe speed for humans who are in the robot’s close proximity, and the cobot can safely “bump” into a human without causing grievous harm. Combining the force feedback with speed sensing, the cobot can respond by stopping if either it or the human exceeds the set limits.
By integrating a safety detection device — such as a scanner or set of light curtains — that detects the presence of a human nearby, the cobot can alternate between this lower speed and its maximum design speed (the latter being an option when the human has vacated the area). It is necessary to perform a stop time measurement to set the safe distance for the detection device(s). This ability to switch back and forth enables the cobot to be as safe as possible when a human is nearby, and to be at its most efficient at carrying out tasks when humans are not present. The supplementary safety measures not only enhance its ability to operate safely with humans and comply with safety standards, but also help to optimize its usability and offer the best ROI.
Part of what makes a cobot an ideal, safe partner in a workspace is the ability to have safety devices easily integrate in its work environment. Between hand-guided teach functions, built-in safety functions, available vision packages, safety device connections, and software monitoring capability, the cobot is prepared to function with an integrated safety package. Providing maximum operator safety is derived from understanding the functionality of the cobot as well as the functionality of a comprehensive safety package. A safety risk assessment establishes a standards-based functional safety performance level.
How is a safe work environment established?
Since cobots are designed to share a workspace with humans, the entire workspace and its peripherals must be considered. Beyond the cobot itself, there are other factors that play into the safety of the cell. To understand all the elements at play in the cell, a safety risk assessment, based on industry safety standards is needed to establish the safety level required. After designing a safety solution, you should validate the solution.
Providing maximum operator safety is derived from understanding the functionality of the cobot along with the functionality of a comprehensive safety package. The value of a cobot in terms of both performance and efficiency is fully realized by supplementing intrinsic safety with an external safety solution. In the end, a standards-based safety risk assessment identifies where supplementary safety devices are needed to ensure a worker’s safety when working adjacent to a cobot, and how to optimize the cobot’s efficiency potential when in collaborative mode and non-collaborative mode. A properly safeguarded cobot can also play its part in the Industry 4.0 work environment, given that this technology has the required flexibility, ease of use, human-machine collaboration capability, and interoperability between vendors.
About the Author
Michael R. Warren is Product Manager, Safety Components and Safety Controllers, for Omron. Warren has held various sales roles in his 12-plus years at Omron, including as a motion specialist, safety product specialist and senior account manager. He has previously worked at THK, Aerotech and Oriental Motor.
Leave a Reply
You must be logged in to post a comment.