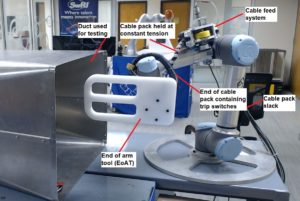
Cable management is usually. headache for collaborative robot arm users, but the Southwest Research Institute has developed the ADDRESS system, a new dress pack method for avoiding tangling.
Continue to Site
The essential guide for cobot end users.
Cable management is usually. headache for collaborative robot arm users, but the Southwest Research Institute has developed the ADDRESS system, a new dress pack method for avoiding tangling.