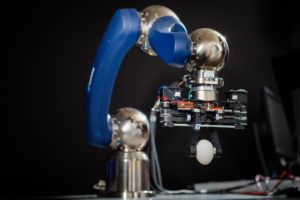
The University at Buffalo developed a two-fingered dynamic gripper that could only refine robotic grasping and improve safety for collaborative robots that work around people. The robotic hand absorbs energy from impacts during collisions. This prevents whatever the robot is holding from breaking, and also makes it safer for people to work with and near […]
Continue to Site